

目录

什么是MCP? Monte Carlo Planning(蒙特卡洛规划)
🎯 MCP = Monte Carlo Planning(蒙特卡洛规划)
这是强化学习和决策系统中很重要的一个方法,特别是在 智能体需要在复杂环境中规划行动策略 的时候,比如:
- 博弈(象棋、围棋、扑克AI)
- 机器人路径规划
- 模拟未来可能性(如大型语言模型的思维链推理)
✅ 一、基本概念
蒙特卡洛规划(MCP) 是一种基于“蒙特卡洛采样”(Monte Carlo Sampling)的方法,用于在状态空间较大或者模型复杂时对未来的决策路径进行模拟和评估。
它的核心思想是:
用随机模拟的方式来“预测”未来某个策略或行动序列的期望结果,然后据此选出最优行动。
✅ 二、与强化学习的关系
在 强化学习(RL) 中,智能体通过试错来学习一个策略。MCP 通常是在已知或可模拟环境模型的前提下使用,比如:
- Model-based RL:有环境模拟器,可以“想象”动作结果。
- Model-free RL:只能依靠经验,通常不适用MCP。
蒙特卡洛规划适用于前者,比如:
- AlphaGo 使用了蒙特卡洛树搜索(MCTS),就是 MCP 的一个强大实现。
- 用环境模拟器“走未来”,预测每种策略的长期回报。
✅ 三、典型算法:蒙特卡洛树搜索(MCTS)
最广为人知的 MCP 实现是 MCTS(Monte Carlo Tree Search),它的基本流程包括:
- 选择(Selection):在树上从根节点走到一个尚未探索的叶子节点。
- 扩展(Expansion):随机选择一个可能的动作,添加到树中。
- 模拟(Simulation):从这个新节点开始,用随机策略“走到底”。
- 回传(Backpropagation):将模拟结果反馈到整个路径上的节点。
这种方式可以用来逼近最优策略,尤其在动作空间大、状态复杂的任务中非常强大。
✅ 四、优点与挑战
| 优点 | 挑战 |
|---|---|
| 不需要完整的模型解析式,只要能“跑模拟”就行 | 模拟次数多时计算资源需求大 |
| 可用于高维、复杂策略场景 | 对连续动作空间不够高效(需改进) |
| 结果具有较强的全局最优性 | 对随机性较敏感,需大量平均 |
✅ 五、应用示例
| 应用场景 | MCP的作用 |
|---|---|
| AlphaGo、AlphaZero | 用于下棋时的决策规划 |
| 机器人控制 | 在动作选择前对未来路径进行评估 |
| 自动驾驶模拟 | 预测不同路径的交通成本与风险 |
| 游戏AI | 用于智能体模拟多种策略对战 |
✅ 六、和大模型的关系(如 GPT)
虽然GPT这类语言模型不直接用MCP,但在“思维链推理”(Chain-of-Thought)或“工具型AI系统”(Toolformer, ReAct)中,可以:
- 引入MCP:让模型尝试多个思路路径 → 对每个路径“模拟未来” → 选择最有前景的答案。
- 结合外部模拟器:比如用 Python 模拟工具,做决策规划。
"我视别人的钱财如粪土,但你的就不一样啦!"

本文由 程序员拉大锯 原创发布于 阳光沙滩 , 未经作者授权,禁止转载
评论
0 / 1024
推荐文章
面向 Java 程序员的 MinIO 入门教程
本文为Java程序员提供了一份详细的MinIO入门教程,涵盖MinIO的部署方法和Java SDK的集成使用。通过本文,您将学习如何在Java项目中高效管理桶和对象,快速上手MinIO这一高性能对象存储服务。
你知道:气和汽的区别吗?
了解‘气’和‘汽’的区别,掌握它们在不同语境下的含义与用法,帮助你更准确地使用中文。无论是日常交流还是写作,这对提升语言能力都大有裨益。
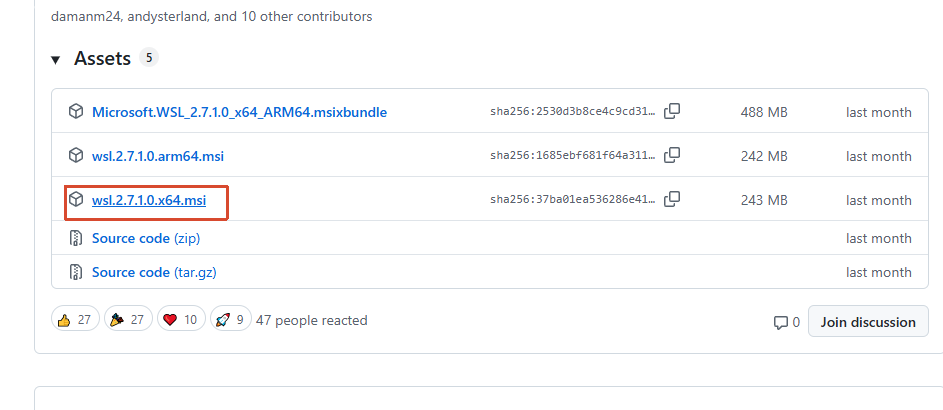
wsl update 下载不下来怎么办呀?
遇到Docker Desktop提示需要更新但无法解决?本文教你如何通过GitHub下载并安装WSL,轻松解决更新问题,适合使用x64芯片的用户。
今日经验:重置虚拟机的密码
本文详细记录了在KVM虚拟化环境中,如何通过virt-rescue工具重置遗忘的root密码。对于需要维护和管理虚拟机的IT人员来说,这是一份实用的排障指南,涵盖了从环境准备到密码修改的完整流程,帮助快速恢复系统访问权限。

今日工作:Android Health Connect 接入记录
本文详细讲解了如何将 Android Health Connect 接入到健康或运动类应用中,涵盖从配置、代码实现到测试验收的完整流程。适合希望统一健康数据管理、提升用户隐私合规性的开发者阅读。
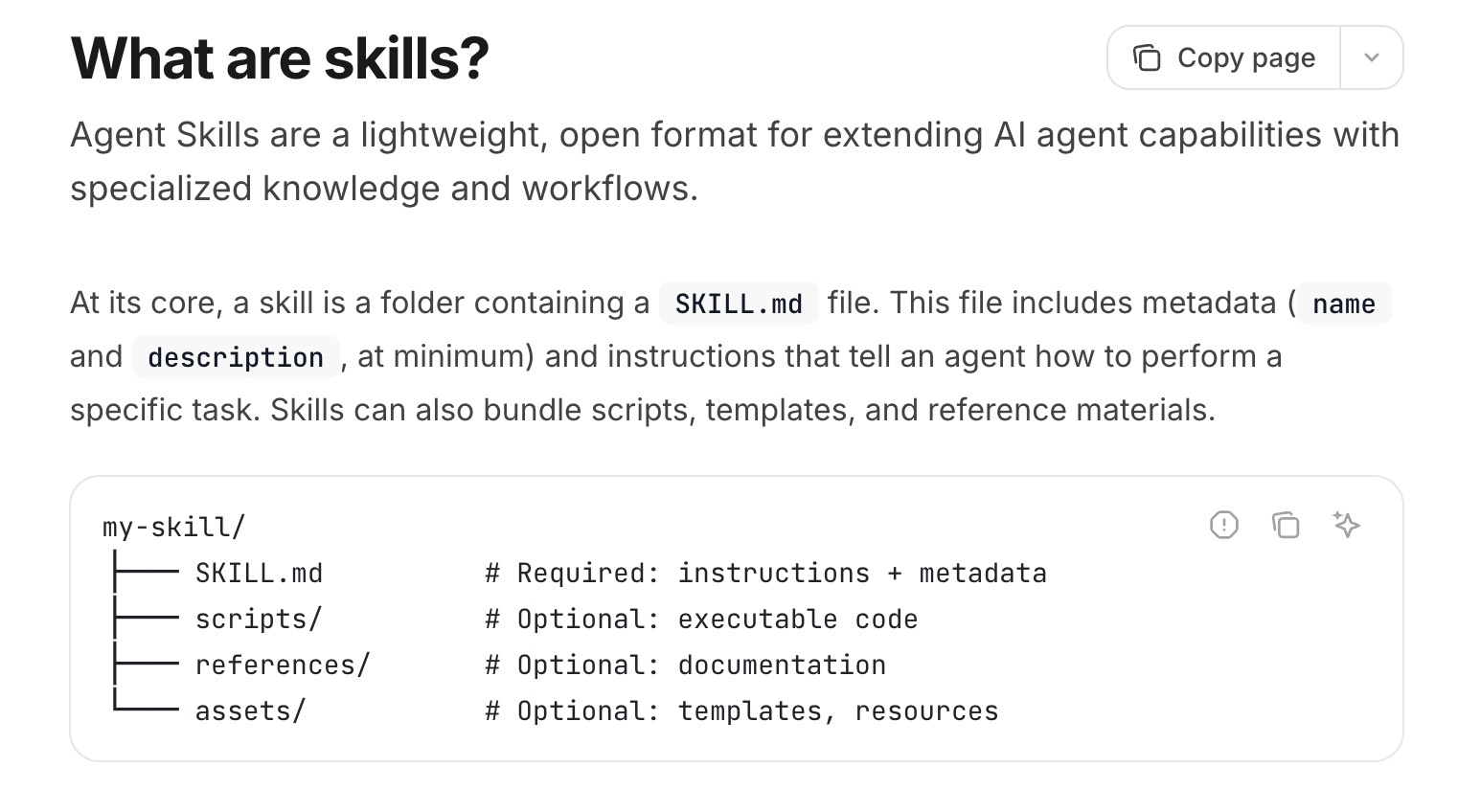
Skill从入门到出家
探索AI Agent的核心能力——Skill,了解其模块化设计、渐进式披露机制和实际应用场景。从基础概念到高级实战,掌握如何构建可复用、可移植的AI技能,提升Agent处理复杂任务的能力。
Docker,Docker Compose,kubectl最近遇到的版本问题
本文分享了在使用Docker、Docker Compose和kubectl时遇到的版本问题及解决方法,适合需要更新或管理Linux系统中相关工具的开发者参考。
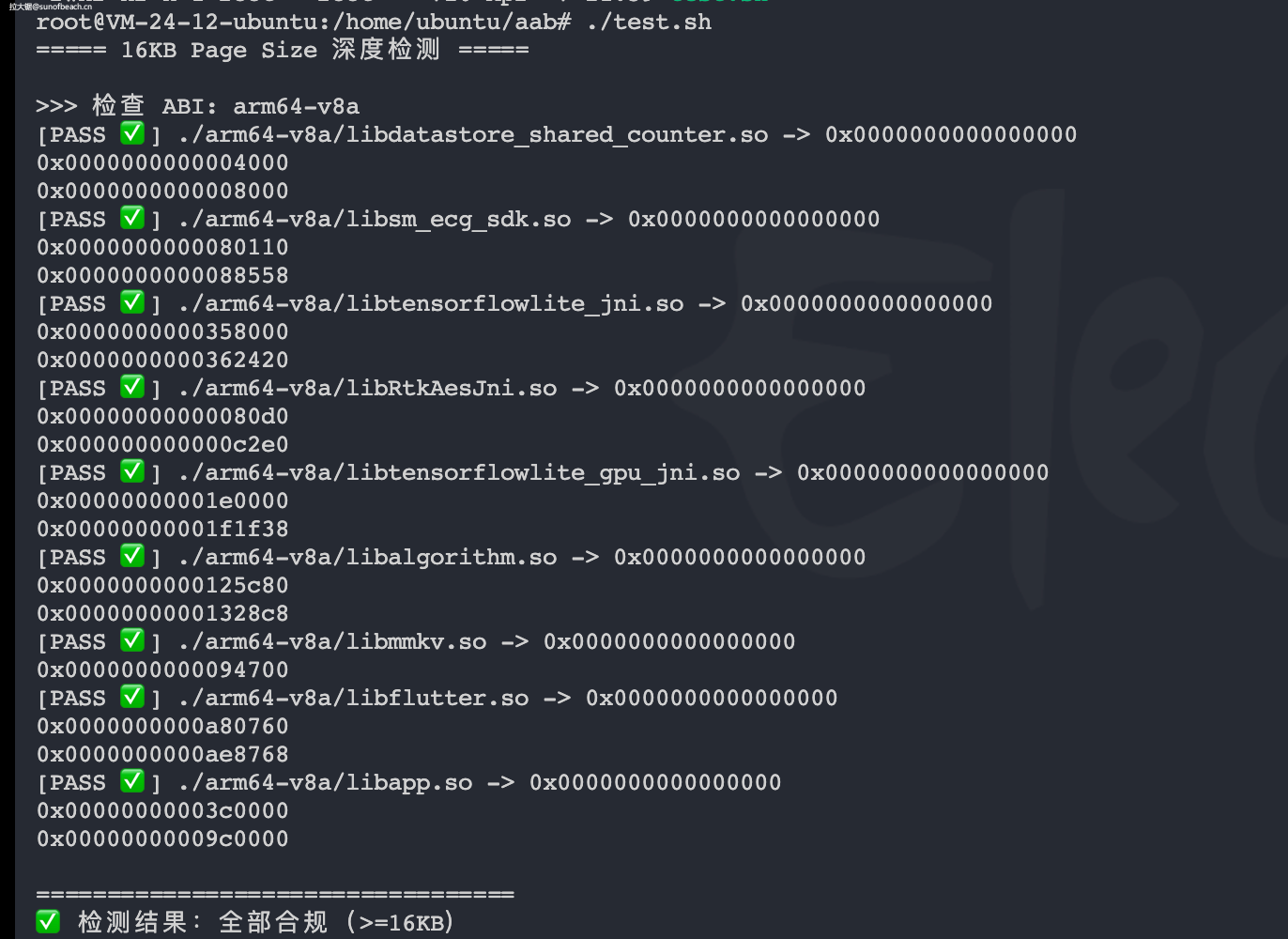
Google上架App退回
Google Play Console 抛出 16KB 内存页面大小合规性错误,导致应用无法上架。本文详细分析了错误原因,并提供了解决方案,帮助开发者适配 Android 15 的新要求。
国内常用的 npm 镜像源整理
在使用 npm 安装依赖时,国内开发者常常遇到速度慢的问题。本文整理了多个稳定且常用的国内 npm 镜像源,帮助提升依赖安装效率。还介绍了如何通过 nrm 工具快速切换镜像,非常适合需要优化开发环境的开发者。
列表项排序设计:分数索引思想与实践
本文介绍了分数索引思想在列表排序中的应用,通过实数轴上的插空方式实现高效插入与拖拽排序。适用于课程章节、导航菜单、看板列等多种场景,提供创建和更新时的业务规则及边界处理策略,帮助开发者优化排序性能并提升用户体验。
2026苹果电脑芯片的性能排行榜
了解2026年前后苹果电脑芯片的性能排名和关键变化,帮助你更好地选择适合自己的设备。从M1到M5,每一款芯片都有其独特优势,无论是日常办公还是专业需求都能找到合适的推荐。
在 KVM 上部署 Ubuntu 24.04 Server:企业级虚拟化完整实践指南
本文详细介绍了如何在 KVM 上部署 Ubuntu 24.04 Server,涵盖系统架构、部署步骤、核心命令解析和性能优化等内容。适合希望构建高性能、低成本企业虚拟化平台的技术人员阅读。
旧版本的kubesphere还能用的
本文介绍了如何使用KubeSphere配置和部署一个Kubernetes集群,包括修改配置文件、设置环境变量以及执行安装命令。适合需要了解Kubernetes集群搭建的开发者和系统管理员阅读。
Flutter Fragment 嵌入模式下返回键/侧滑直接退出应用-日常记录
在 Flutter 混合开发中,如何解决 Android 返回键无法正确触发 Flutter 页面返回逻辑的问题?本文详细解析了事件传递机制,并提供完整解决方案,包括 Android 和 Flutter 层的配置方式。适合开发者快速排查和修复类似问题。
记录一个问题,Post请求变Get请求了?原因很简单
本文讲述了一个关于HTTP请求方法被错误转换的问题,通过分析Nginx配置和日志,最终发现是由于301重定向导致POST请求变成GET请求。作者详细描述了问题排查过程,并给出了解决方案,对于开发人员在处理类似网络问题时具有参考价值。
Android 进阶:在非 ComponentActivity 中实现协程自动取消
本文深入探讨了在 Android 开发中如何为非 ComponentActivity 的类实现 LifecycleOwner 功能,分享了两种优雅的解决方案。通过手动注册和 Kotlin 属性委托的方式,确保协程能随 Activity 销毁而自动取消,提升代码健壮性。适合对 Android 生命周期管理和协程使用感兴趣的开发者阅读。
Uni-app 发送通知全解析(从本地通知到推送服务实战)
深入了解Uni-app中通知的四种类型及应用场景,掌握跨平台支持情况和代码实战技巧。从基础提示到高级推送架构设计,全面解析如何提升用户活跃度和业务触达能力,适合开发者系统学习与实践。
MQTT 学习指南:从入门到工程实践
深入解析MQTT在物联网中的核心作用,了解其轻量、稳定和省流量的特性。从发布/订阅模型到QoS机制,全面掌握MQTT的通信原理与应用场景,助你高效构建物联网系统。
深入理解 Java NIO:非阻塞 I/O 的原理、应用与案例实战
本文深入解析 Java NIO 的核心概念,包括 Buffer、Channel 和 Selector,对比传统 I/O 的优势,并通过实战案例展示如何构建高并发的聊天服务器。适合希望提升 Java 网络编程能力的开发者阅读。
二次函数全攻略:公式、图像、性质与应用
二次函数是数学中的核心内容,广泛应用于物理、经济和工程领域。本文系统讲解其定义、图像、性质及实际应用,通过案例帮助理解,适合学生和数学爱好者深入学习。
Java排序算法全解析:从冒泡到快速排序,案例实操
掌握Java中常见排序算法的实现方法,理解其时间复杂度和适用场景,提升编程能力。从冒泡排序到快速排序,全面解析各种排序技术,帮助你高效解决问题。
Java 面试算法题全解析:案例、讲解与面试频率分析
Java面试中,算法题是必考内容。掌握常见算法不仅能提升编程能力,还能提高通过率。本文详细讲解了两数之和、链表反转、二分查找等经典算法题的解题思路与实现代码,帮助你更有针对性地准备面试。
Java基础语法入门:跟着案例一步步学会
掌握Java基础语法,从零开始学习编程。本文通过实战案例,详细讲解程序结构、变量、运算符、条件语句、循环、数组和方法等核心内容,适合初学者系统学习。通过练习提升编程能力,为进阶开发打下坚实基础。
Java 多线程入门:从概念到实战(初学者必看)
掌握多线程编程,提升程序效率和响应速度。本文从基础概念到实战案例,一步步讲解如何在 Java 中实现多线程,帮助你快速上手并理解核心知识点。通过实际代码示例,了解线程的生命周期、常用方法及线程安全问题,适合初学者和进阶者学习参考。
Java 多线程入门:从概念到实战(初学者必看)
掌握多线程编程,提升程序效率与响应速度。本文从基础概念到实战案例,详细讲解Java多线程的实现方式、注意事项和线程安全问题,适合初学者快速上手。通过实例代码,帮助你理解如何高效编写多线程程序。
Flutter开发网路库封装示例
本教程详细介绍了如何在 Flutter 项目中通过 Dio 库封装网络请求,提供了一套完整的封装类及使用示例,适用于构建中大型项目。内容覆盖依赖引入、封装方法实现、使用场景演示以及扩展功能建议,帮助开发者快速提升代码复用性和可维护性。无论是初学者还是有经验的开发者,都能从中受益。
写完这些案例,就掌握flutter开发了。
学习如何在Flutter中实现输入框的实时显示、页面跳转与数据传递,以及动态列表的展示和网络请求数据的解析与展示。通过这些基础案例,掌握Flutter的核心功能,为构建复杂应用打下坚实基础。
Flutter学习路线
想要掌握Flutter开发?这篇详细的学习路线图将帮助你从零开始,逐步成长为Flutter开发者。覆盖基础入门、核心概念、进阶开发以及发布优化四个阶段,结合理论与实践,让你轻松掌握Flutter技能。无论是想开发手机应用还是探索跨平台开发,这份指南都能满足你的需求。立即行动,开启你的Flutter之旅吧!
什么是MCP? Monte Carlo Planning(蒙特卡洛规划)
MCP(Monte Carlo Planning,蒙特卡洛规划)是强化学习和决策系统中的重要方法,广泛应用于复杂环境下的行动策略规划。无论是博弈中的AI,还是机器人路径规划,MCP都能通过随机模拟预测未来策略的效果。其中,蒙特卡洛树搜索(MCTS)是其典型实现,具有强大的全局最优性和适应高维复杂策略的能力。文章详细解析了MCP的基本概念、与强化学习的关系、典型算法以及实际应用场景,展示了其在AlphaGo、自动驾驶、游戏AI等领域的卓越表现。
智能体相关的概念介绍一下,并且给出学习路线!
智能体是人工智能领域的重要概念,广泛应用于强化学习、多智能体系统和机器人学等方向。本文从智能体的基本概念出发,介绍了其核心组成和分类,并提供了涵盖基础知识、模型理解、实践项目及前沿研究的系统学习路线。无论是初学者还是希望深入探索的研究者,都能从中找到有价值的信息和资源。
10